Deployment in Smart Cities
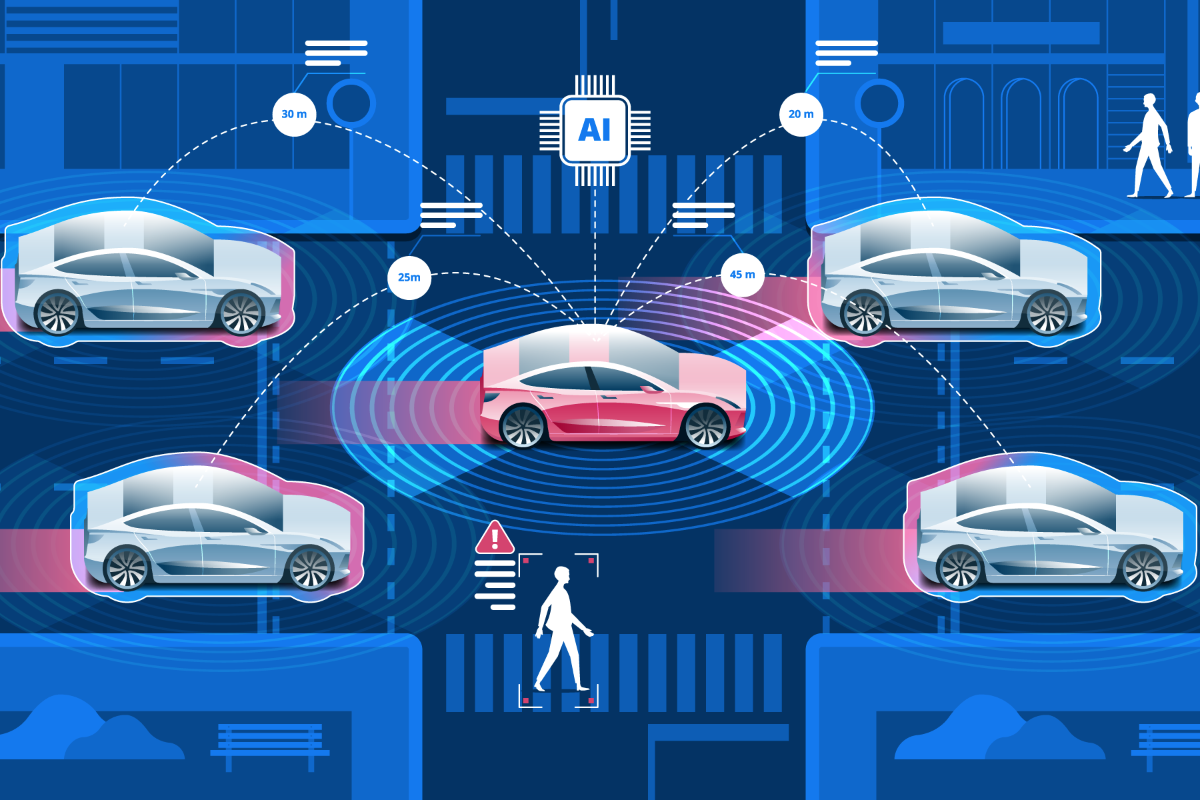
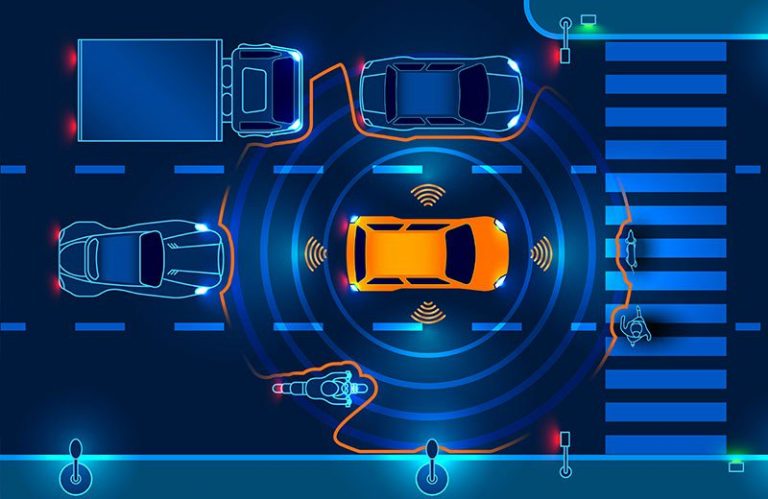
Connected and Autonomous Vehicles (CAVs) have the potential to expedite the realization of a smart city. This convergence of three technologies, namely wireless connectivity, automation, and electrification, creates a vehicle that is capable of self-driving and parking, sharing and storing digital content, sensing and monitoring its surroundings, and mobilizing electrical power. In a smart city, these capabilities can be translated into various kind of services. However, the provisioning of these services will be challenging due to different issues as well as the human fear and trust in this technology.