- Citations



In recent years, autonomous Unmanned Aerial Vehicles (UAVs) equipped with cameras have become very popular with the wide variety of applications such as surveillance, aerial mapping, search and rescue, infrastructure inspection, precision agriculture etc. Automatic understanding of visual data collected from these UAVs has been of great interest to industry and academic research and development. Visual object detection is one of the important aspects of applications of UAVs and is critical to be integrated in fully autonomous systems.
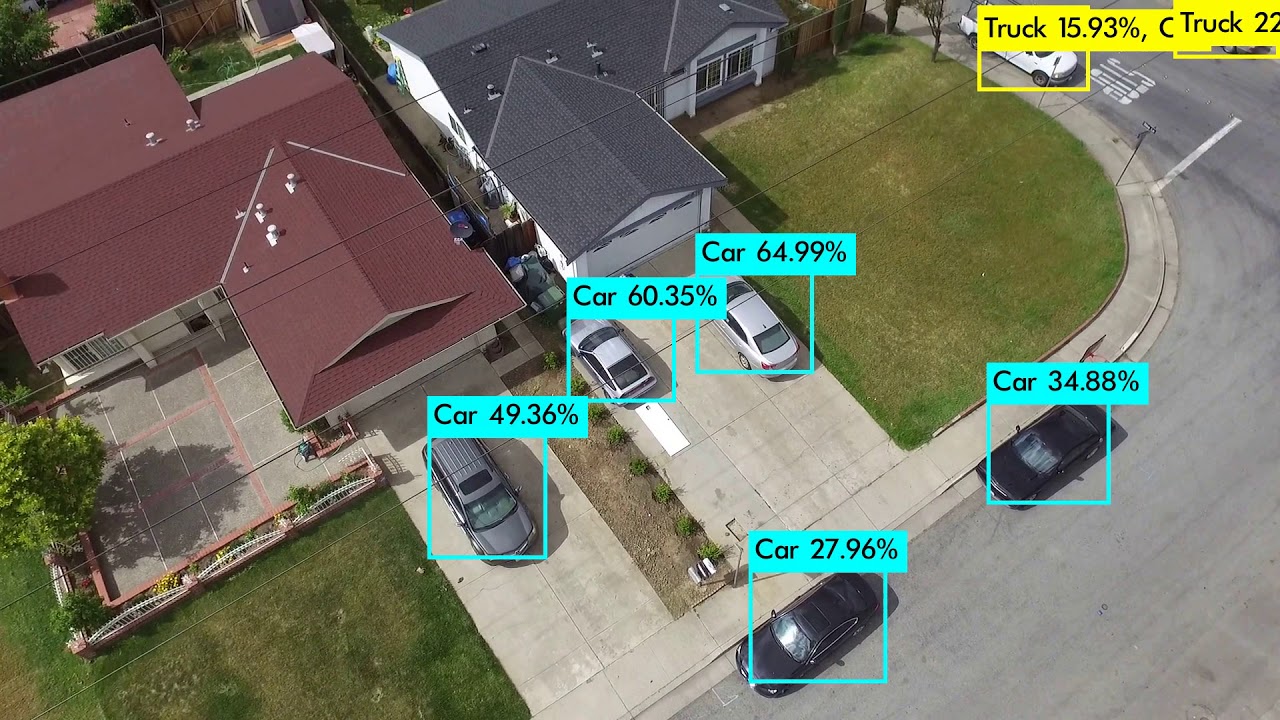
However, the task of real-time object detection using UAVs is very challenging as it is affected by various imaging conditions, such as noise, blur, low resolution, small target sizes, computational constraints, etc. The task is even more difficult because of the limited computational resources available on the UAVs and the need for almost real-time performance such as navigation, traffic management, monitoring, etc.
An unmanned aerial vehicle, commonly known as a drone, is an aircraft without any human pilot, crew, or passengers on board. UAVs are a component of an unmanned aircraft system, which includes adding a ground-based controller and a system of communications with the UAV.
The task of real-time object detection using UAVs is very challenging as it is affected by various imaging conditions, such as noise, blur, low resolution, small target sizes, and computational constraints.